 فارسی
فارسی


ویژگی های موتور
ویژگی های موتور القایی
1 ، به طور کلی ، موتور القایی میکرو به موتور چرخانده شده توسط القایی اشاره دارد. موتور القایی هنگام شروع و چرخش به خازن و الکترومغناطیس متکی است. گرچه گشتاور شروع آن خیلی زیاد نیست ، اما ساختاری ساده ، کارایی بالا دارد و می تواند به صورت چرخشی ادامه یابد.
2 ، موتور تک فاز هنگام کار با چرخش دارای جهت معکوس است. Pis فقط پس از توقف موتور ، جهت چرخش موتور تک فاز را تغییر می دهد.
3 ، موتور سه فاز به تأمین سه فاز متکی است. راندمان بالایی دارد و می تواند گشتاور شروع بالایی را بدست آورد.
Motor ویژگی های موتور برگشت پذیر
1 ، موتور برگشت پذیر دارای یک ترمز اصطکاکی در پشت بدنه موتور است که برای کاربردهایی طراحی شده است که در آنها غالباً معکوس جهت لازم است. برای ترمز اصطکاکی ، نقاشی را بررسی کنید 1. نم نم با فنر بر روی دیسک ترمز چرخان تأثیر می گذارد و با فشار مداوم تأمین می شود. عملکرد ترمز اصطکاکی به شرح زیر است:
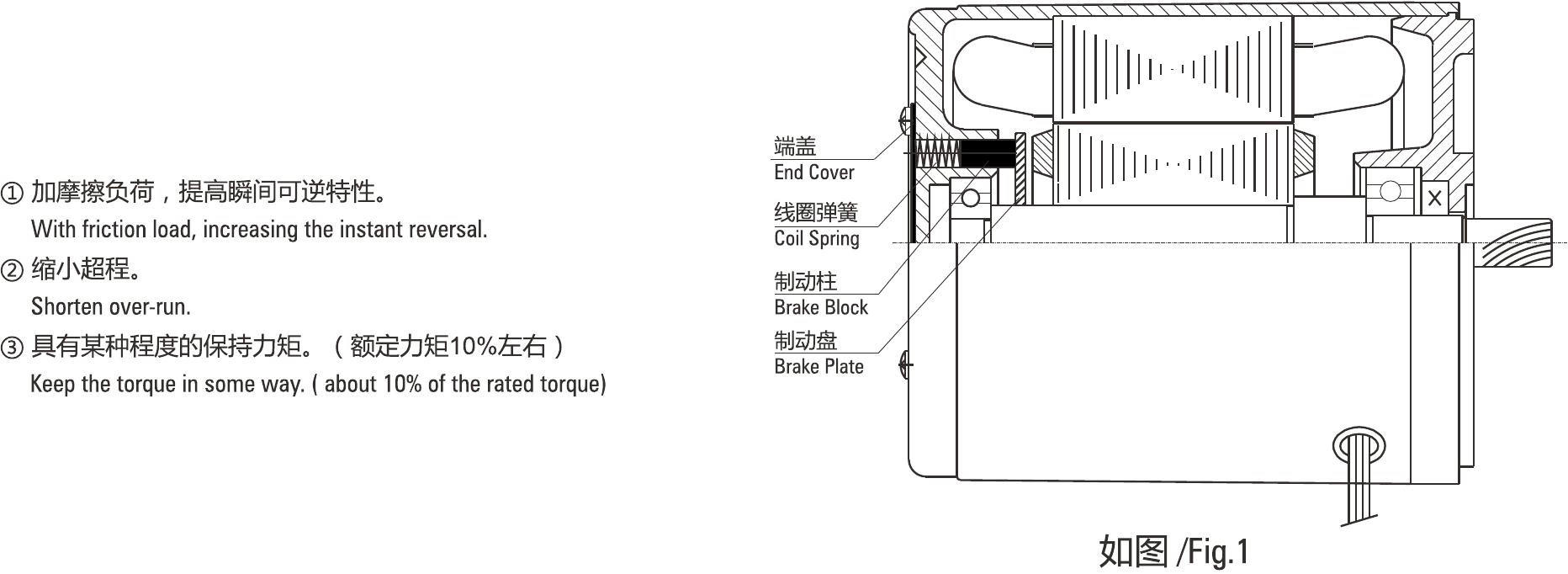
2 ، گشتاور نگهدارنده یا بیشتر ترمز اصطکاکی و بیش از حد کارکرد در جدول 1 ذکر شده است. این فقط برای مرجع است. زیرا با توجه به دوره چرخش و همچنین دما تغییر خواهد کرد. Pls همچنین یادآور می شود که هنگام کار در ابتدا ، ممکن است گشتاور کمی کمتر از آن باشد که در جدول ذکر شده است.
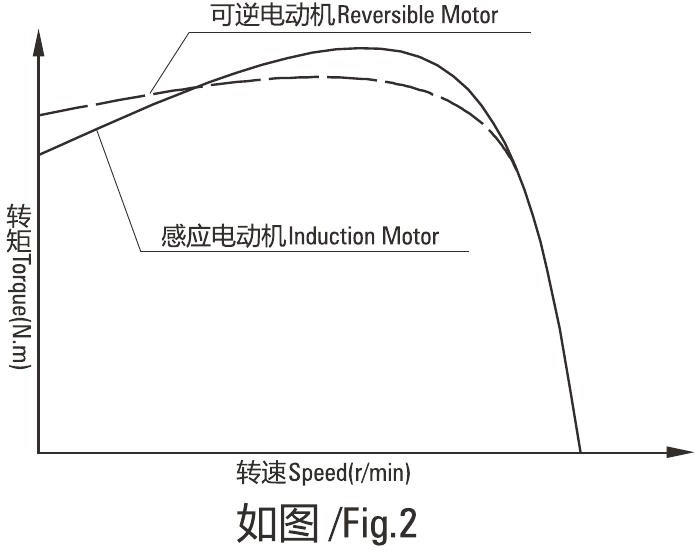
3 ، موتور برگشت پذیر ، مانند موتور القایی ، توسط خازن راه اندازی می شود و دارای همان ویژگی گشتاور با موتور القایی است. اما موتور برگشت پذیر با گشتاور شروع بالاتر طراحی شده است تا ویژگی های برگشت فوری را افزایش دهد. Pls نقاشی 2 را بررسی کنید
جدول 1. گشتاور را نگه دارید و بیش از حد کار کنید
| فاز | اندازه | خروجی | مدل موتور | گشتاور را حفظ کنید | بیش از حد اجرا | |
| میلی متر | W | N.cm | Kgf.cm | چرخه | ||
| Sing-فاز | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
■ خاموش کردن ویژگی های موتور ترمز الکترومغناطیسی نوع فعال
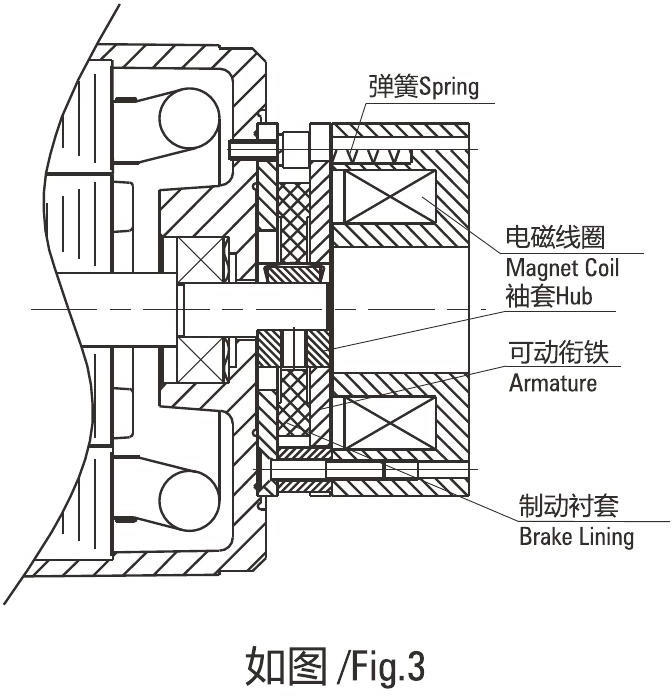
1 ، اصل ساختار و عملیات
جدول 3 ساختار موتور ترمز الکترومغناطیسی است. ما نوع خاموش فعال فعال را تولید می کنیم. با اعمال ولتاژ روی سیم پیچ ، آرماتور فشرده شده توسط فنر را مغناطیسی می کند. هنگامی که بین آرماتور و لبه ترمز ایجاد شود ، موتور در مرحله چرخش قرار خواهد گرفت. پس از قطع ولتاژ سیم پیچ ، تحت تأثیر فنر ، آرماتور لبه ترمز را فشار می دهد ، که باعث ایجاد نیروی ترمز می شود. سپس موتور متوقف می شود.
2 ، مشخصات ترمز الکترومغناطیسی
این یک ترمز الکترومغناطیسی فعال و خاموش است که مستقیماً به موتور متصل است. هنگامی که منبع تغذیه خاموش است ، به سرعت چشمک می زند و بار را حفظ می کند گشتاور را بین 0.05-2.0 نیوتن متر حفظ خواهد کرد. به خصوص برای ترمز ایمنی در شرایط خاموش شدن ناخودآگاه مناسب است. الکترومغناطیسی می تواند جهت خود را به طور مکرر تغییر دهد. در یک دقیقه 6 بار می توان جلوی آن را گرفت. اما مطمئن باشید که 3 ثانیه یا بیشتر دوام می آورد.
بعد از اینکه یک حلقه کموت در ترمز تنظیم کردیم ، می تواند منبع تغذیه را با موتور تقسیم کند.
value مقدار استاندارد است. این در شرایط مختلف تغییر خواهد کرد. هنگام استفاده واقعی ، حتماً دمای سطح موتور را کمتر از 90 درجه سانتیگراد قرار دهید.
3 ، ویژگی های زمان شروع و زمان ترمز
زمان استارت به معنای زمان شروع موتور به علاوه زمان ترمز الکترومغناطیسی است. زمان ترمز به معنی زمان قطع شدن برق تا قطع کامل موتور است. بیش از حد ، زمان شروع و زمان ترمز با توجه به کاربردهای مختلف متفاوت خواهد بود.
■ جدول 2. ترمز الکترومغناطیسی (نوع فعال شده خاموش)
| Phase | اندازه خروجی | ولتاژ V | فرکانس هرتز | جریان A | ورودی W | گشتاور را حفظ کنید | بیش از حد اجرا | ||
| مادر | W | N.cm | Kgf.cm | چرخه | |||||
| 1 فاز | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3 فاز | 60 | 6 | 220 ~ 230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380 ~ 415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200 200 230 380 ~ 415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200 200 230 380 ~ 415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200 200 230 380 ~ 415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
■ ویژگی های موتور کنترل سرعت
1 ، این یک واحد کنترل کننده و موتور است. فقط باید یکبار وصل شود. سرعت را می توان به راحتی توسط پتانسیومتر تنظیم کرد. کنترل کننده با حلقه کنترل سرعت ، خازن ، تصویب سرعت و غیره ثابت می شود. هیچ عملکرد توقف فوری در واحد وجود ندارد.
2 ، کنترل کننده می تواند سرعت متغیر را بین 90 تا 1350 دور در دقیقه در 50 هرتز و 90-1650 دور در دقیقه در 60 هرتز ایجاد کند.
3 ، لطفاً موتور را با سرعت کم برای مدت طولانی کار نکنید و از گرم شدن بیش از حد جلوگیری کنید. 33











