ماموریت ما : Zhongda به امکانات بی نهایت در برنامه های اتوماسیون پی می برد.
ما می توانیم محصولات سفارشی و پروژه را با توجه به نیازهای خاص ارائه دهیم. لطفا در صورت نیاز با ما تماس بگیرید
دبلیو 25 وات (منبع تغذیه DC وقتی روی 24VDC / 36VDC / 48VDC اعمال می شود)
| قدرت نامی (پیوسته) | W | 25 (15 وات / 25 وات) | |||
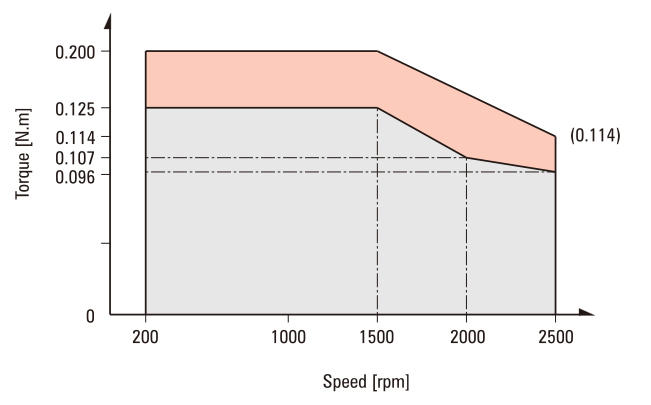
| سرعت نامی | دور در دقیقه | 2500 | |||
| گشتاور نامی | N.m | 0.096 | |||
| حداکثر گشتاور لحظه ای | N.m | 0.144 | |||
| لحظه اینرسی روتور | J: X10 -4 کیلوگرم 2 | 0.042 | |||
| محدوده کنترل سرعت | دور در دقیقه | فشار بالا 200-2500 دور در دقیقه (فشار کم 200-3000 دور در دقیقه) | |||
| محدوده کنترل سرعت | روی بار | زیر 1 ±: شرایط 0 ~ گشتاور نامی ، سرعت نامی ، ولتاژ نامی ، دمای اتاق | |||
| در ولتاژ | زیر 1 ±: ولتاژ نامی condition 10، ، سرعت نامی ، بار نامی ، دمای اتاق | ||||
| در دما | زیر ± 1٪: شرایط دمای محیط 0 ~ 40 ° C ولتاژ نامی ، بار راتود و سرعت نامی | ||||
| ورودی برق | ولتاژ محاسبه شده | V | تک فاز 110 ولت | تک فاز 220 ولت | 24VDC (اختیاری 36VDC / 48VDC) |
| محدوده تحمل ولتاژ | 10 ± | ||||
| فرکانس | هرتز | 50/60 | / | ||
| محدوده تحمل فرکانس | 5 ± | / | |||
| جریان ورودی دارای امتیاز | آ | 1.0 | 0.6 | 1.7 | |
| حداکثر جریان ورودی لحظه ای | A | 2.0 | 1.2 | 2.6 | |
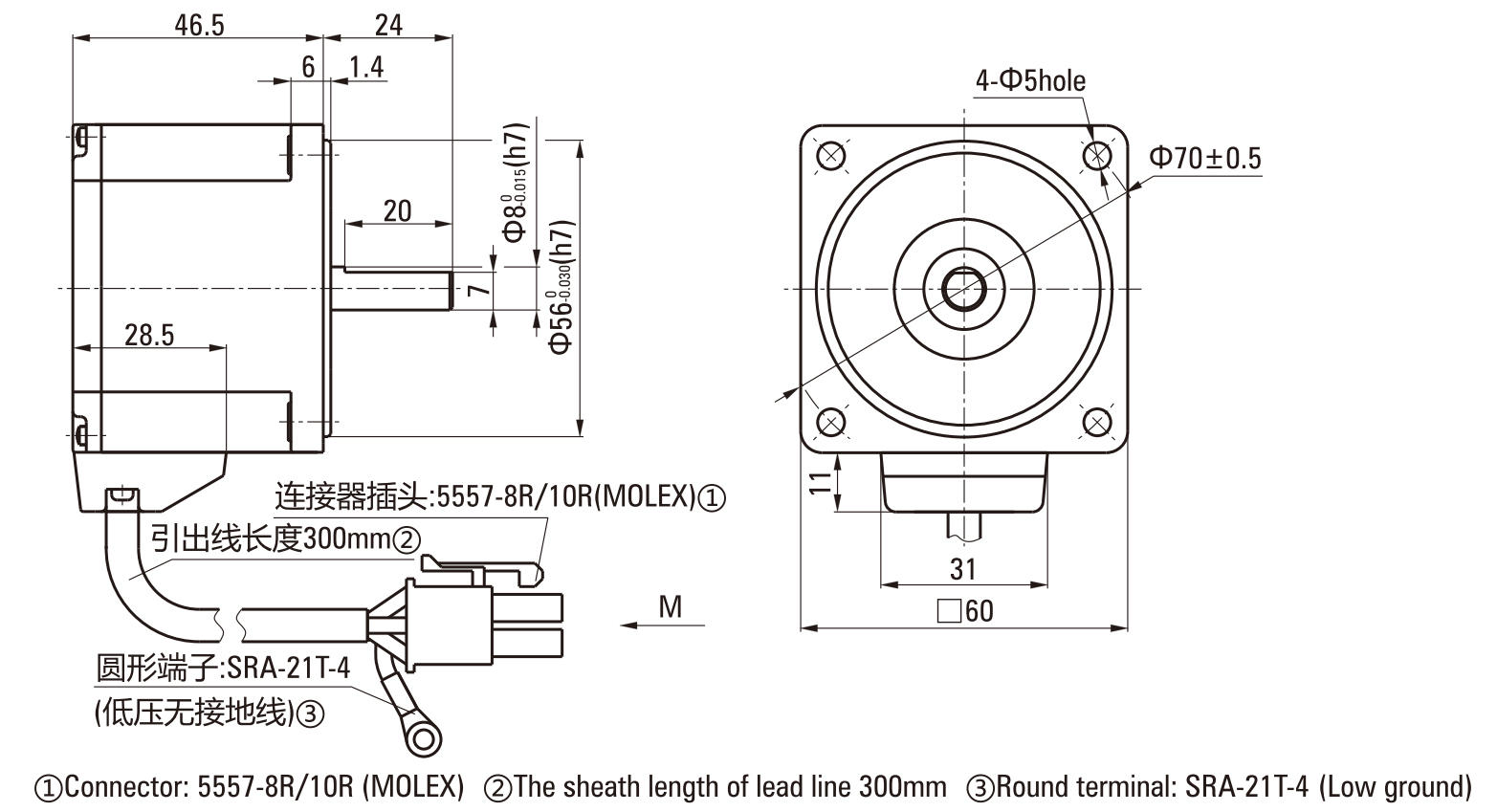
● Z2BLD25-◘A-25S ━ ولتاژ 24/36/48/110/220
| ● نمودار Z2BLD25-220A-25S |
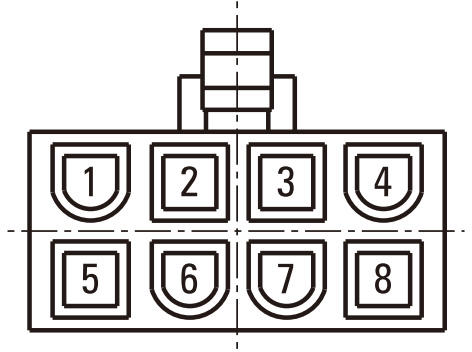
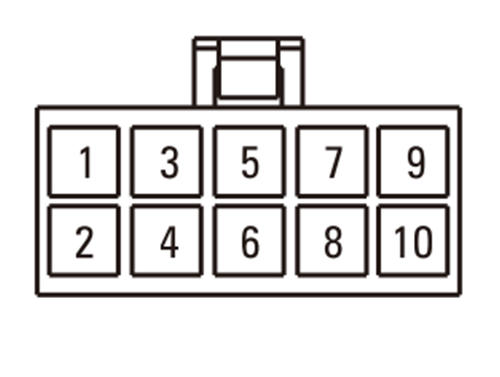
● ولتاژ پایین دبلیوrie Plughole با توجه به توضیح سیگنال | ● ولتاژ بالا دبلیوrie Plughole با توجه به توضیح سیگنال | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
|  |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
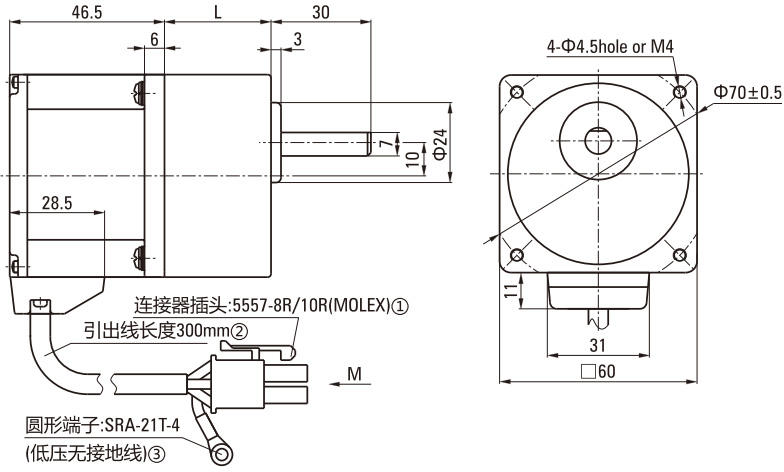
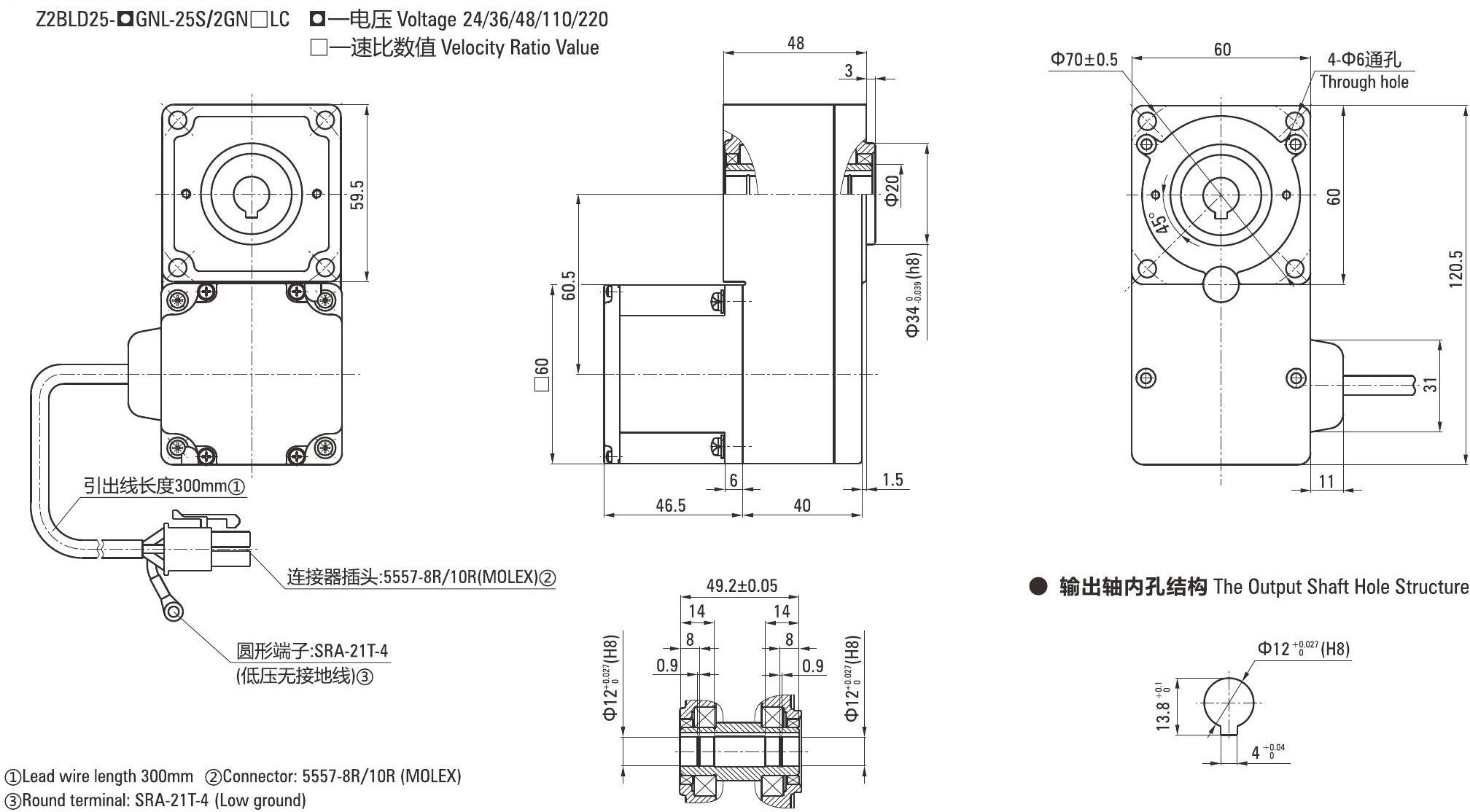
| ● کاهش دهنده سرعت شفت موازی Z2BLD25-◘GN-25S / 2GNDK ◘ — ولتاژ 24/36/48/110/220
onn اتصال: 5557-8R / 10R (MOLEX) ② طول غلاف خط سرب 300 میلی متر term ترمینال گرد: SRA-21T-4 (زمین کم) | ● دهانه دنده 2GN □ XK □ - مقدار نسبت سرعت ، به طور کلی 10
• نسبت دنده را در جعبه (□) در داخل نام مدل وارد کنید |
• گشتاور قابل قبول دستگاه Z2BLD15-◘GN-25S / 2GN □ K (واحد: N.m)
| مدل | نسبت سرعت / کاهش موتور | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 10 | 12.5 | 15 | 18 | 20 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 | 200 |
| Z2BLD15- □ GN | 200 ~ 1500 دور در دقیقه | 0.18 | 0.22 | 0.30 | 0.36 | 0.45 | 0.54 | 0.60 | 0.75 | 0.91 | 1.08 | 1.09 | 1.36 | 1.63 | 1.96 | 2.72 | 2.95 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 |
| 2000 دور در دقیقه | 0.17 | 0.21 | 0.29 | 0.35 | 0.44 | 0.52 | 0.58 | 0.73 | 0.87 | 1.04 | 1.30 | 1.56 | 1.87 | 2.60 | 2.82 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | |
| دور 2500 دور در دقیقه | 0.14 | 0.17 | 0.23 | 0.28 | 0.35 | 0.42 | 0.46 | 0.58 | 0.70 | 0.84 | 0.84 | 1.05 | 1.25 | 1.51 | 2.09 | 2.27 | 2.83 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 |
• گشتاور مجاز ماشین آلات Z2BLD25-◘GN-25S / 2GN □ K (واحد: N.m)
| مدل | نسبت سرعت / کاهش موتور | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 10 | 12.5 | 15 | 18 | 20 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 | 200 |
| Z2BLD25- □ GN | 200 ~ 1500 دور در دقیقه | 0.30 | 0.36 | 0.50 | 0.60 | 0.75 | 0.91 | 1.00 | 1.26 | 1.51 | 1.81 | 1.81 | 2.27 | 2.72 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 |
| 2000 دور در دقیقه | 0.29 | 0.35 | 0.49 | 0.58 | 0.73 | 0.87 | 0.97 | 1.21 | 1.46 | 1.75 | 1.75 | 2.18 | 2.61 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | |
| دور 2500 دور در دقیقه | 0.23 | 0.28 | 0.39 | 0.46 | 0.58 | 0.69 | 0.77 | 0.97 | 1.16 | 1.39 | 1.39 | 1.74 | 2.09 | 2.51 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 | 3.00 |
توجه داشته باشید که ■ (خاکستری) در جدول نشان می دهد که جهت چرخش با موتور مطابقت دارد. (گشتاور تحت سرعت و نسبت سرعت مختلف تحت استاندارد ZD بدست می آید.)
• کاهش دهنده سرعت L نوع
• گشتاور مجاز ماشین آلات Z2BLD15-◘GNL-25S / 2GN □ LC (واحد: N.m)
| نسبت سرعت / کاهش موتور | 5 | 10 | 15 | 20 | 30 | 50 | 100 | 200 |
| 200-1500 دور در دقیقه | 0.27 | 0.54 | 0.82 | 1.09 | 1.63 | 2.72 | 5.44 | 10.9 |
| 2000 دور در دقیقه | 0.23 | 0.46 | 0.69 | 0.92 | 1.38 | 2.30 | 4.60 | 9.20 |
| دور 2500 دور در دقیقه | 0.21 | 0.42 | 0.63 | 0.84 | 1.25 | 2.09 | 4.18 | 8.37 |
توجه: تمام جهت چرخش خروجی گیربکس در فرم مخالف جهت چرخش موتور است. (گشتاور تحت سرعت و نسبت سرعت مختلف تحت استاندارد ZD بدست می آید.)
• گشتاور مجاز دستگاه Z2BLD25-◘GNL-25S / 2GN □ LC (واحد: N.m)
| نسبت سرعت / کاهش موتور | 5 | 10 | 15 | 20 | 30 | 50 | 100 | 200 |
| 200-1500 دور در دقیقه | 0.50 | 1.00 | 1.51 | 2.01 | 2.72 | 4.53 | 9.06 | 16.4 |
| 2000 دور در دقیقه | 0.43 | 0.85 | 1.28 | 1.70 | 2.30 | 3.83 | 7.67 | 13.9 |
| دور 2500 دور در دقیقه | 0.35 | 0.70 | 1.05 | 1.39 | 2.09 | 3.49 | 6.97 | 12.6 |
توجه: همه جهت چرخش خروجی گیربکس در فرم مخالف جهت چرخش موتور است. (گشتاور تحت سرعت و نسبت سرعت مختلف تحت استاندارد ZD بدست می آید.)
NINGBO ZHONGDA LEADER INTELLIGENT TRANSMISSION CO.، LTD. در سال 2006 تاسیس شد ، ما بیش از 1500 کارمند داریم ، 66666m2 منطقه و 676 میلیون فروش در سال 2019 داریم.

کپی رایت © کلیه حقوق محفوظ است Ningbo Zhongda Leader شرکت هوشمند انتقال ، با مسئولیت محدود.
 فارسی
فارسی